| 产品特性:驱动器接口 | 是否进口:否 | 产地:以色列 |
| 加工定制:否 | 品牌:ACS | 型号:NPApc 1****2** |
| 产品名称:NPApc 1-2个驱动器,12-100V,高达13.3/40A - | 适用范围:它被专门设计用于对运动和稳定时间、静止抖动和速度平稳性具有要求的应用 | 用途:例如晶圆测量和检测、FPD检测、光学元件处理中的***精度加工 |
| 产品认证:CE(EMC、安全)和 UL,申请中 符合 RoHS | 特色服务:强大的双轴驱动器模块 | 最小包装数:1 |
| 物料编号:NPApc 1****2** | 是否跨境货源:否 |
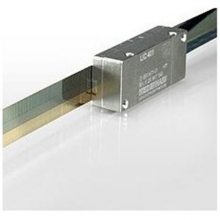
NPApc 1-2个驱动器,12-100V,高达13.3/40A

单/双轴NanoPWM驱动器,带±10V电流换向指令
强大的双轴驱动器模块
每个模块两个驱动器
电压:12Vdc–100Vdc
电流:高达13.3A/40A(连续/峰值)
高要求定位应用的驱动器
亚纳米级静止抖动
纳米级跟踪误差和速度平稳性
具有PWM驱动器的所有优点,替代线性驱动器
±10v电流换向指令控制器-驱动器接口
热损失更小
可靠性更好
尺寸大大减小
电源要求更简单
数字控制和简易设置
动态范围控制
STO(安全转矩关断)选项
内置电机相位短路继电器选项
NPAPC是现有进的一款PWM伺服驱动器,其被专门设计用于对运动和稳定时间、静止抖动和速度平稳性具有要求的应用,例如晶圆计量和检测、FPD检测、光学元件处理中的***精度加工。
NPAPC基于ACS***的专利技术 ,其性能超越当前仅线性驱动器可实现的静止抖动和跟踪误差性能,且具备PWM型驱动器的所有优点,如更小的热损失、更小的尺寸、更好的可靠性。
NPAPC被设计由任何支持两种±10V正弦波电流换向指令的运动控制器进行操作。
***的 功能使运动控制器能动态调整驱动器的电流/指令增益,以实现更高分辨率的低电平电流控制,从而提供更佳的速度平稳性和***的位置抖动控制。
电流环PI滤波器可编程。它的增益可通过对16个预设值之一设置四个逻辑输入进行选择,还可采用SPiiPlusMMI软件协议进行编程。驱动器具有过流、过温和过压保护。该装置支持电机过温保护。
该装置可控制外部继电器,以使电机相位短路,实现动态制动。
产品支持在其载板上实现STO(安全转矩关断),以符合EN ISO 13849-1系统安全标准。
CE, UL (申请中)
EtherCAT?为注册商标和专利技术,由德国Beckhoff Automation GmbH许可
规格
| 每个驱动器 | A | B | C | D |
| 连续/峰值电流正弦振幅[A] | 3.3/10 | 6.6/20 | 10/30 | 13.3/40 |
| 连续/峰值电流[Arms] | 2.3/7 | 4.6/14.1 | 7/21.2 | 9.4/28.2 |
| 100Vdc时的连续/峰值输出功率[W] | 2.6 | 5.3 | 8 | 10.6 |
| 峰值电流时间[s] | 1 | |||
| 100Vdc时的最小 负载电感[mH] 可被呈线性地降低, 以实现***的电压 | 0.05 | |||
| 每个模块 | ||||
| 控制电压输入[Vdc] | 24 ±10% | |||
| 驱动器电压输入范围[Vdc] | 12 – 100 (推荐96) | |||
| 驱动器电压[Vdc] | (Vin电机) x 88% | |||
| 连续输入电流 [Arms] | 5.2 | 10.6 | 16 | 21.2 |
| 热损失[W] i=驱动器的数量 | 7 + 0.9 x i | 7 + 2.1 x i | 7 + 3.7 x i | 7 + 5.6 x i |
驱动器
类型: 三相桥式 技术。
PWM频率: 20 kHz.
切换方法: ***的单极性PWM。
控制: PI数字滤波器。PI增益通过一个四位DIP开关选择,连接至PC时可编程。
电流环采样率和更新率:20kHz。
可编程电流环带宽:高达4kHz,随调整和负载参数的变化而变化。
保护: 过欠压、过流、过温、相间短路和单相接地(其中一个电机相短路可能会损坏变频器)。
减少电机相位的内置继电器(选配): 断开电机与驱动器的连接,电机相位短路
电源
该模块由两个电源供电。一个电机电源和一个24Vdc控制电源。
紧急情况下无需断开24Vdc控制电源。
电机驱动电源
范围:12Vdc-100Vdc。推荐值:96Vdc。
额定电流应基于实际负载进行计算。
若需使用再生电阻器,则其必须与电机电源并联,并带102V分流激活装置。
控制电源
范围:24Vdc±10%
输入电流/功率:1A/20W,不带电机制动器。
带两个电机制动器:1.9A/42W
保护: 反极性保护
电机类型
两相和三相永磁同步(直流无刷/交流伺服)、直流有刷、音圈、两相和三相步进(微型步进开环或闭环)
驱动器-控制器接口
电流指令输入: 正弦波电流换向指令,±10V差分,16位分辨率。
偏移:<20mV,带宽<5KHz。
动态范围控制输入: 5V,光电隔离,源型。输入电流<7mA。
0V时,一个10V的电流指令将产生规定的电流。
5V时,一个10V的电流指令产生的电流为规定电流的1/8。
驱动器打开/关闭输出: TTL,启用时低电平有效,禁用时高电平有效。
输出电流为1mA。
驱动器使能输入: TTL,低电平有效。输入电流:<7mA。
驱动器故障输出: TTL,高电平有效。输出电流为1mA
STO(安全转矩关断)
支持在其载板上实现STO(安全转矩关断)
更多详情请见 &#39;安装和载板设计指南&#39;
电机制动器控制输出
每个驱动器一个,24V±20%,源型,0.5A。
电流监测模拟量输出
每个驱动器两个,用于电机相位S和T。
类型: ±10V,差分,16位分辨率。
偏移: ±50mV,输出负载:10kΩ
EtherCAT通信
用于连接一个ACS运动控制器,以实现电流环设置和调整。
两组EtherCAT信号:输入和输出
环境
工作范围:0至40°C
储存和运输范围:-25至+60°C
湿度(工作范围):5%至90%,无凝结
尺寸
155 x 85 x 30 mm3
重量
360g
附件
无